Computer Vision for Drone Search and Rescue Applications
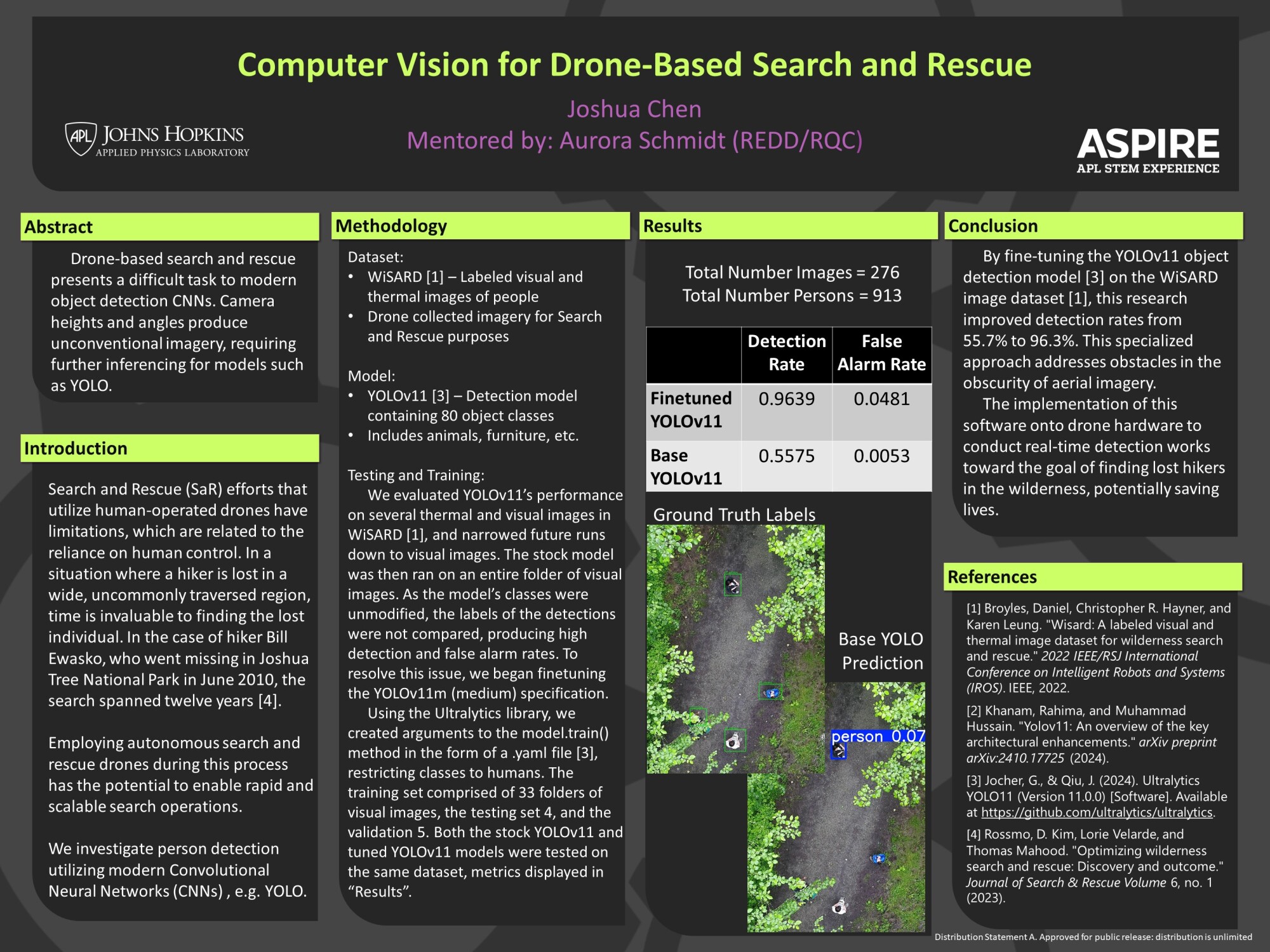
Drones have the potential to scale up search and rescue operations to find people who are lost in the wilderness. Currently drones must be teleoperated by human pilots, limiting the area that can be rapidly searched. To enable autonomous search, this project researches the potential to adapt a pre-trained object detection model (YOLO) to perform person detection in top-down or oblique angles, which are common in drone imagery.
Intern: Joshua Chen
Mentor: Aurora Schmidt (REDD)

















-Textiles.jpg)













-(1).jpg)
