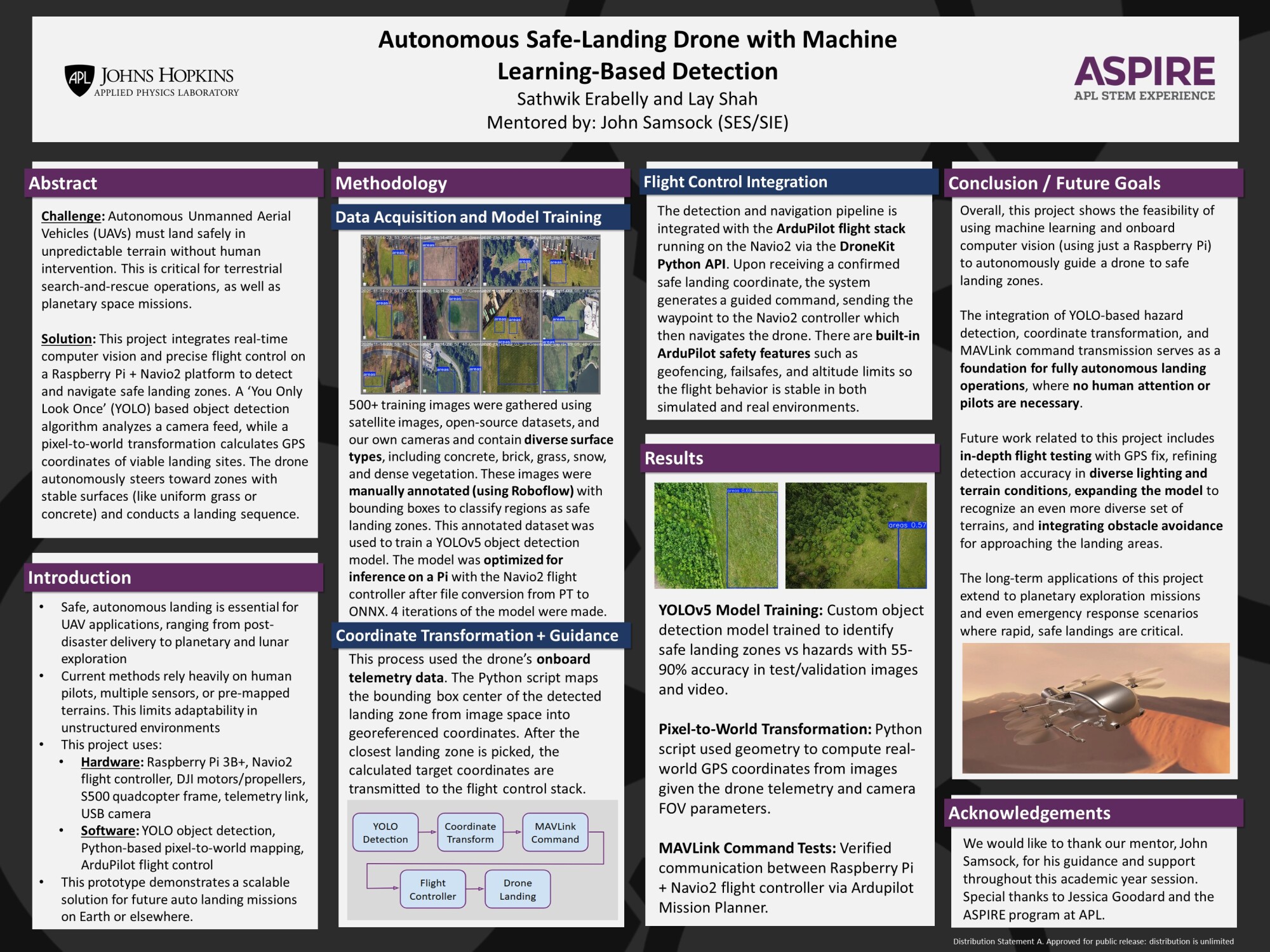
Autonomous Safe-Landing Drone with Machine Learning-Based Terrain Detection
This autonomous drone locates safe landing zones in real time using a YOLO object detection model and a single downward-facing camera, flagging hazardous surfaces like water, trees, shrubs, and snow while steering toward stable ground like concrete or grass. A pixel-to-world coordinate transformation converts image data into real-world positions using the drone's altitude, field of view, and image geometry, feeding those coordinates directly into a Raspberry Pi and Navio2 flight controller to guide the landing sequence. The broader goal is to develop landing intelligence that scales to unstructured environments, including planetary missions like NASA's Dragonfly, where a drone must make safe, unsupervised landing decisions on terrain no human has mapped before.
Interns: Sathwik Erabelly and Lay Shah
Mentor: John Samsock (SES)

















-Textiles.jpg)













-(1).jpg)
