

Aerospace Engineering & Planetary Science

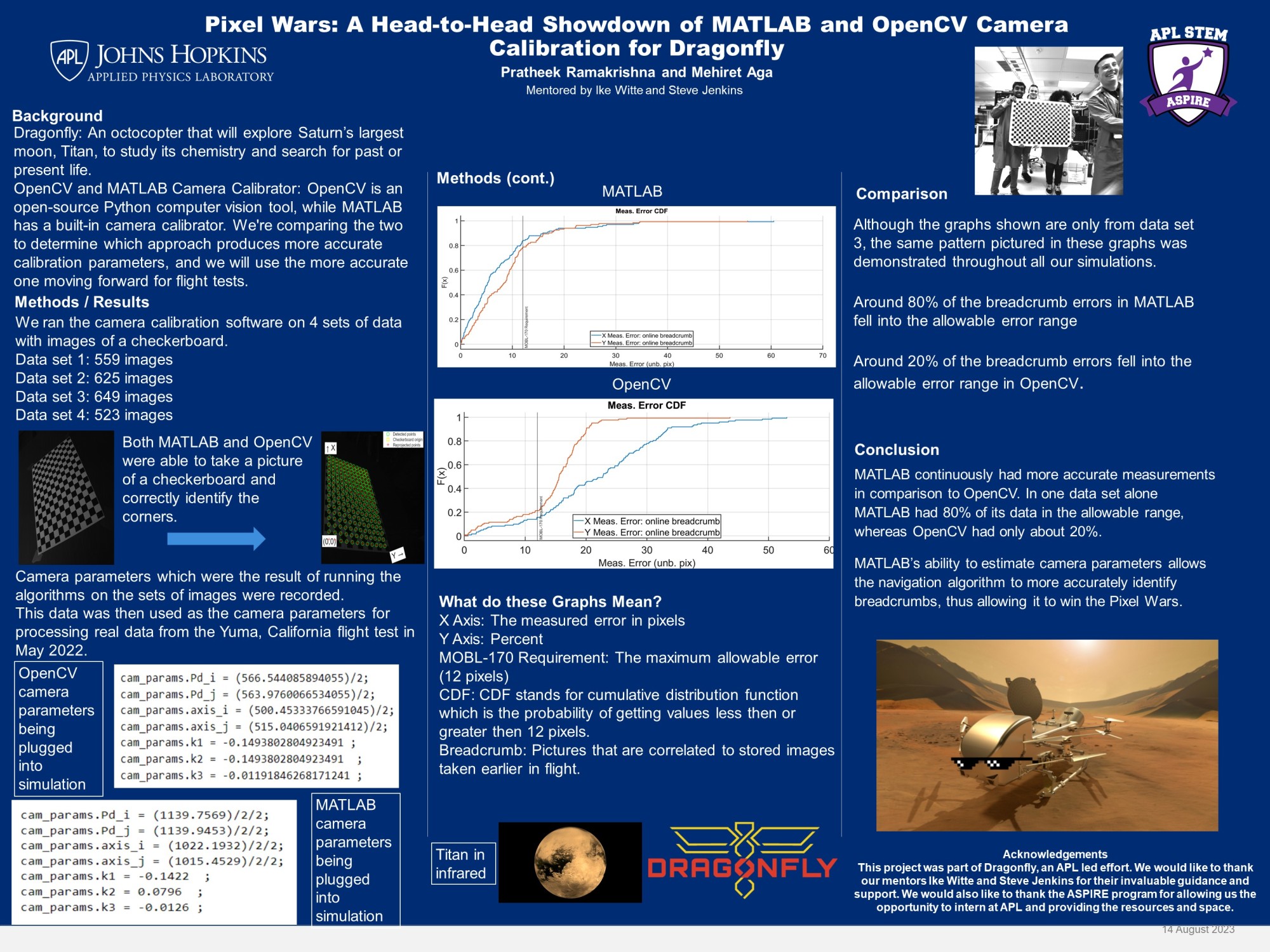
Pixel Wars: A Head-to-Head Showdown of MATLAB and OpenCV Camera Calibration for Dragonfly

CASTLE: Collection and Storage of TLEs

Parker Solar Probe Spacecraft Electronics Health Assessment Tools

The Planetary Surface Texture Laboratory: Operations and Calibration

Higher-Fidelity propagator in C++ for cislunar mission design

Matlab Automated Data transfer for Booster and Trajectory softwares (MAD BAT)

Spacecraft Operations

Applied Physics

Properties of Psychrometrics

Magnetomap: On the Hunt for Complex Magnetic Signatures

Using Quantum Control to Measure Small Frequency Separations

Biology & Chemistry

What A Shocker! Electric Resistance Spectroscopy Applied to Plant Matter

Printing Biopolymers for Coral Restoration

Exploring dissolvable PVA material for novel decontamination formulas

Computer Science

FALCON: Focused Artificial Learning & Cognitive Operating Nexus

Analyzing Strategic Interests in Countries and Key Topics through Machine Learning and Natural Language Processing

Synthetic Aperture Radar Image Formation

NeRF in Unreal Engine 5

AlphaCeleste: Design and Control of an AI Platforming Speed Runner

Generative AI Tools for Better Data Visualization

Chatting with your Video

AIM: Asset Inventory Management for Space Hardware

APL Campus Accessibility Map

Natural Language Processing for IRAD Proposals

Modelling and Traversing Campus using Graphs

Military Aircraft Image classification

AI vs 2048

Engineering

IMU Dead Reckoning with TinyML

The Ins and Outs of Your Smart Watch: What’s inside of a Wearable?

Thermal Modeling and Analysis of Aluminum Honeycomb Panels Used in NASA/APL’s Dragonfly Mission Lander’s Fuselage

Battlefield Resource Allocation and Information Network (BRAIN): Coordinating Operational Medicine

Engineering at Central Spark

Spoofing a RFID Reader

Unlocking COSMOS: A Migration Journey to Modernize Spacecraft Radio Telemetry and Control

CORSAIR Embedded Software

Over Terrain Vehicle

Audio Signals Processing

Using robots to create a cleaner environment

Software Defined Radio: RF Signal Processing using GNU Radio

Geese tracker

Powering a Nokia 2760

5G Campus Network Monitoring

Utilizing Low-Cost Air Quality Detection Systems to Analyze PM 2.5 Levels

A Device to Measure CPR Performance and Provide Real-Time Feedback

FPGAs and Towed Arrays

Free Space Laser Communications Link

Information Technology & Cybersecurity

Plasmonics for Communications

A Comparison of Steganography Exploits

Vulnerability Analysis on Space Systems

Artificial Intelligence

Mathematics & Data Analysis

A Graphical User Interface for Streamlined Social Network Analysis

Double Trouble: An Adapted Analysis of a Zika Virus Dynamical Systems Model

Mathematics & data analysis

Mathematics & data analysis

Approximating the Permanent

Using Human Factors Data for Better Decision Making

An Evaluation of the Environmental Impact of Food and Beverage Products Around the World

Model Improvements and Sensitivity Analysis for Estimating Road Transportation Emissions Globally

Other

Making EZIE-Mag Go Viral

Catching Criminals Workshop

Citizen Science: Using Open Source Data to Solve Public Works Problems

Microstructure Evolution of Inconel 718 under Laser Powder Bed Fusion

xZone: a Universal Data Acquisition, Control and Visualization Framework
